|
Сказки про вынос, устойчивость, управляемость!
Почему, мол, мотоциклы не падают...
Сказка первая - наивная...
Однажды маленький мальчик, ложась спать, спросил у папы почему, мол, мотоциклы
не падают. У папы, ясное дело, только одно в голове.
И понеслась сказка в ночь.
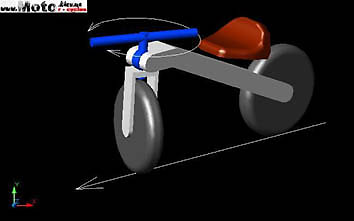
Жил был маленький самокатик, которому не повезло в жизни ни с выносом вилки, ни
с наклоном рулевой колонки: Даже движка у него нету. В общем жил да был такой
себе самокатик.
Маленький такой самокатик. Слабенький он был. И так ему хотелось убежать-уехать
за тридевять земель, за тридесять морей. Да никак не получалось у него ехать
туда, куда хотелось. Только двинется, а ножки-колесики и подводят, съезжают с
пути истинного, потому, как нет у самокатика идеологической подоплеки, не знают
ножки куда ехать надо: толи к женщинам, толи - к пиву: Самокатик он правильный
был, хоть и болезненный, потому решил сначала за пивом заехать. Ну, как это
всегда бывает, перебрал. Немножечко так перебрал. Но только хватило этого
перебора, чтобы глазки у самокатика окосели, ножки подломились:
И вспомнил тогда самокатик о женщинах. Он всегда вспоминал о них в самые тяжкие
минуты. И запела у него душа, и полетели к женщинам все его мысли, и понеслось к
ним сердце. Не знаю откуда у самокатика сердце, но оно у него огромное было.
Ножкам-колесикам тоже хорошо стало. И покатились ножки, куда и надо катиться в
таких случаях.
В общем через тернии к звездам. И даже если ножки сбивались с прямого пути,
казалось, что какая-то сила возвращает их на место, и снова мчался самокатик.
Мчался так, как можно только после пива мчаться. И шатало его конечно же. Кого ж
после пива не шатает? И не мог он иногда на ножках устоять - падал. Ну кто ж
после пива-то не падает? Как притормозит, наклОнится в сторонку, так колесико
туда же повернется, и руль-носик в землю бумсь!
Но поднимался самокатик. Кто ж не поднимется, когда к женщинам идти хочется?
Но уже долго шел так самокатик, спотыкаясь и падая. И начал потихоньку трезветь:
Стали у него ножки выравниваться. Но когда ножки выравниваются, труднее идти
становится, как ни странно. Ну, все у этого самокатика не так, как у людей.
Когда ножки совсем ровными стали, самокатик совсем опечалился. Как же теперь
дальше-то идти? Задумался самокатик. Расслабились ножки у самокатика и
разъехались немножко. Наклонилось бедрышко у передней ножки-колесика. Самокатик
стоял и думал, думал, даже сам не заметил, как покатился дальше. Сам собой
как-то так покатился и все тут. Катился себе, думал, и совсем ничего не замечал
вокруг. Не замечал, как колесико немножко поворачивается, и сила какая-то его
обратно возвращает.
И когда наклонялся он немножко в сторону, колесико поворачивалось маленько в ту
же сторону, под самокатик подныривало, подкатывалось под него, как бы
выравнивая, и опять ровнехонько ехал самокатик. Этого он тоже не замечал. Видно
не зрелая у него еще карма была, чтобы замечать все и сразу. И никак он с такой
кармой не мог понять, что думать ему уже не о чем, не мог он понять, что все в
жизни у него уже есть: пиво - есть, женщин - любит, и даже Устойчивость в пути
обрел наш самокатик.
Много лет прошло с тех пор. Вырос наш самокатик. Поумнел. Или дури у него больше
стало. На ногах стал крепче стоять. Но стал он замечать, что чем Устойчивее
становится, тем тяжелее ему становится налево ездить. Да и направо, собственно,
тоже тяжело. Стареть начали у него костяшки, стало труднее Управлять колесиками.
Задумался тогда самокатик: "Вот ведь интересно? Вот почему в молодости, был я
свободен двигаться куда угодно, а падал часто? А сейчас постарел, стал
устойчивым, не падаю вот, а двигаться так, как раньше, в любую сторону не
выходит: В Управляемости, как бы, потерял, в былой легкости." И осознал
самокатик проблему, и начал он о ней думать. И началась великая медитация у
самокатика на тему устойчивости и управляемости. Одно ему было понятно: в
природе все взаимосвязано и, теряя в одном, находим в другом, и наоборот. И
явились ему в его великой медитации знания. Оказывается, в молодости, когда он,
немножко так, ножки-колесика вперед наклонил, у него в ножках Вынос образовался,
колесико на земле стало стоять немножко позади чем то место, на которое ножки
смотрели.
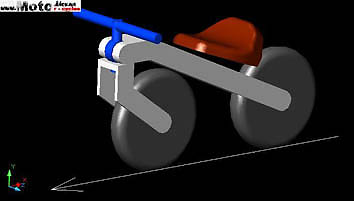
И радостно ему стало, расцвел наш самокатик. С годами, правда, он становился
важным, ножки выставлял вперед все больше. Когда ножки выставлял, то и вынос
увеличивал, даже не подозревая, что именно от этого Устойчивее становится, но
при этом, и в управляемости теряет, уж тут ничего не поделаешь, выбирать всегда
приходится.
Но ведь любви все возрасты покорны, и налево направо-то ходить не расхотелось: И
придумал таки наш самокатик как извратиться так, чтобы и важным остаться и прыть
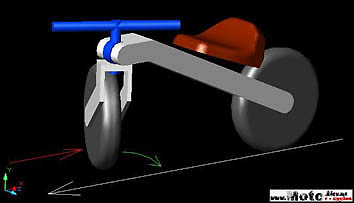
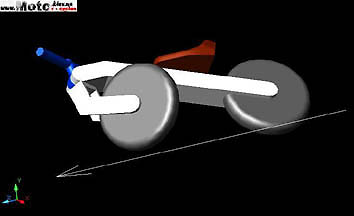
былую себе возвернуть. Стал наш самокатик ножки не только наклонять вперед, а
еще и выставлять их хитро так, незаметно, но подальше чем обычно.
Вернулась к самокатику былая прыть, а устойчивость с опытом пришла и никуда
больше не исчезала.
Да еще как раз в это время приснилось самокатику чудище, которое на огромном
самокате верхом сидело. И сказало чудище: "Ты с помощью траверс, перья вилки
реально вперед выпри, шоб они дальше рулевой колонки торчали, и рулез форевер!
А если ты хочешь полный кулл, тада наклоняй вилку в гипер, а чтоб не
беспредельничать с траверсами, установи в них перья ваще не паралельно колонке
руля, а под небольшим углом!"
Ничего не поняв самокатик траверсы все-таки сделал. Смешно они смотрелись, эти
траверсы. Но ведь в жизни Идея - единственная стоящая вещь. И стал самокатик
ездить с траверсами.
Наконец-то до папы байкера дошло, что малыш давно уже спит, а сам папа в дреме
бредит хуже, чем под пивом.
Но тема для папы все-таки была интересная. И начал он о ней думу думать. И не
смог уже заснуть.
Решил он для себя по возможности осознать, что есть что, и почему.
Сказка вторая - полутеоретическая, познавательно-исследовательская...
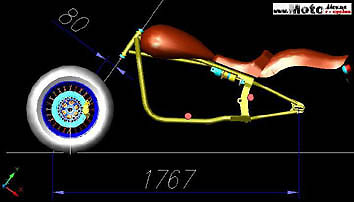
И так, что такое этот самый вынос, про который он так долго дитю бредил?
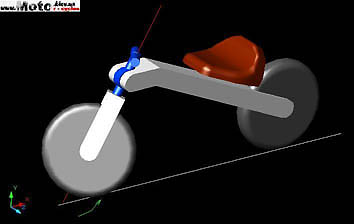
Выходит, что Вынос - это расстояние, между точкой контакта колеса с асфальтом, и
точкой пересечения оси рулевой колонки все с тем же асфальтом.
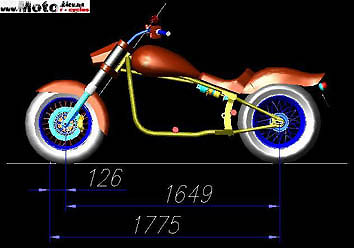
На данном рисунке выносом будет величина 126мм.
А что есть устойчивость? В детстве, когда папа-байкер еще не был папой-байкером,
он любил кататься на велике. Особенно интересно было без руля ездить.
Разгоняешься немного и спокойно себе отпускаешь руки. Велик едет себе прямо,
никуда не сворачивая. Им даже управлять можно, если наклонятся немного в
стороны. Но бывало сядешь на велик, а он никак на дороге не хочет ровно ехать,
только руки отпустишь, руль - круть куда-нибудь, и ты уже никуда не едешь,
просто лежишь себе, про рыбалку думаешь, про пиво... Значит Устойчивость
двухколесного аппарата - это когда он способен после определенной скорости ехать
ровно и не падать, или способность плавно уравновешивать на ходу все силы
воздействующие на аппарат. Видел папа-байкер по телеку, однажды, устойчивый
аппарат: там мужик какой-то на высохших соляных озерах пытался рекорды на
скорость ставить. Вода она всегда ровная, пока ветра нету, а как замерзнет без
ветра, так ровный очень каток получается, и когда озеро соленое высыхает, тоже
ровный каток получается, только не изо льда он, а из соли. В общем разогнался
тот мужик-рекордсмен, а тут маятник ему ка-ак заколбасит, да из седла он ка-ак
вылетит, да только зацепился там за что-то и попер волоком позади мотоцикла,
будто нога у него в лошадином стремени зацепилась. Потом, правда отпал
рекордсмен от мотоцикла. Его машина сопровождения подобрала и давай они все
вместе уехавший рекордный мотик догонять. Мотик, видать уже на шестой передаче
был, когда его колбасить начало, а как водилу скинул, расслабился и покатил на
холостом ходу, километров эдак 70-80 км/ч, а то и больше. Прикольно смотрелось
как толпа в автобусе за пустым мотиком ехала: Аппарат потому и не падал, что
устойчивым был. Значит Устойчивость - есть способность аппарата, в силу
конструкционных особенностей, сохранять заданное пилотом направление без,
собственно, вмешательства пилота (повторимся: реально - после набора какой-то
скорости). Еще у мотоцикла принято управляемость описывать. Надо сказать, что
Управляемость - практически есть послушность, есть нечто наoборотное от
устойчивости. Потому, как Управляемость - это способность аппарата чутко и
адекватно реагировать на руководящее воздействие коммунистической: да не - на
воздействие пилота, конечно же. И если устойчивый аппарат из поворота сам
выныривает, управляемый - держит траекторию, то есть еще и
Неуправляемо-неустойчивый - сам в поворот заныривает, и ездить на таком вы не
сможете - расколбасит. Видели наверное как едет себе, едет болид, а потом вилка
по сторонам как заметелится ("шимми" или Автоколебания), вплоть до разрушения
аппарата вместе с пилотом, если он, пилот, НЛО покинуть не успевает. О "шимми"
мы может попозже еще вспомним, если таковая мысль сконнектиться с головой
папы-байкера.
Папа-байкер знал, что чем больше вынос, тем аппарат устойчивее стоит на дороге
(при достаточной скорости, потому, что совсем без скорости аппарат падает с
любым выносом) и это хорошо при дальнобое. С другой стороны таким аппаратом
очень трудно управлять, потому, что как только такой аппарат наклоняется, он как
бы сам стремится выровняться, опять встать горизонтально, не давая рулить.
Завалить такой аппарат в поворот ну очень тяжело. Да и по городу ездить напряжно.
Если вынос уменьшить очень сильно, тогда колесо уже не будет само выравниваться
и аппаратом постоянно придется рулить, подруливать, или он сам рулить начнет, но
с такой частотой (опять "шимми"), что без уменьшения скорости (если успеете ее
уменьшить) ничего и поделать нельзя. Это происходит потому, что колесо мотоцикла
подвержено внешним силам. Сопротивление трения резины и качения подшипников как
бы постоянно "тянет" колесо назад, вопреки силе тяги движка, и поскольку сила
сопротивления приложена дальше, чем ось вращения вилки, сама вилка на ходу
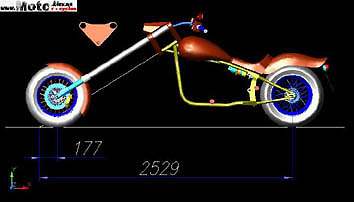
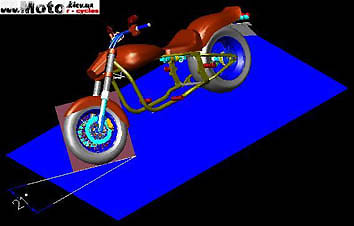
постоянно выравнивает свою траекторию. Это как колесико нашего самокатика на
самом первом рисунке. Не обязательно разбирать кинематику и механику процесса,
достаточно посмотреть на тележку базарную, и просто убедиться в том что все так
и есть. Колесо едет туда, куда его толкают. А работает вынос точно так же, как
работает указатель ветра, только вилку не ветром разворачивает, а силой
сопротивления, которая действует позади оси вращения вилки и "держит" колесо
строго в том направлении, в котором оно катится.
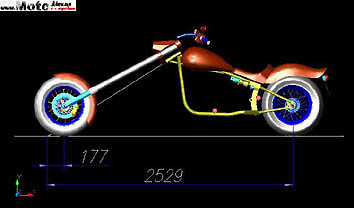
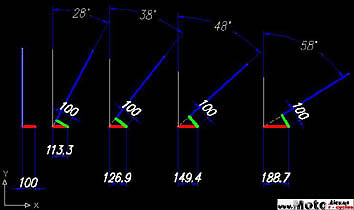
Сила сопротивления, которая возвращает вилку на место при случайном отклонении,
может быть одинаковой, но чем дальше она приложена от рулевой колонки, тем
больше у нее рычаг, и тем крепче эта сила "держит" вилку. Вот поэтому, чем
больше вынос, тем ровнее стоит аппарат на ходу. Да и с другой стороны, если
строго сверху смотреть, то при разных выносах разная картина получается, когда
колесо в силу случайных колебаний немножко в сторону уходит (ну неровности на
асфальте там: и проч.), то есть если малЕнько смещается пятно контакта, скажем,
на пол сантиметрика в сторону уходит. Вилка с большим выносом поворачивается при
этом совсем немножко, меньше, чем на два градуса.
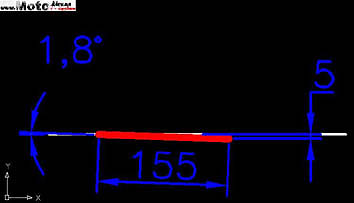
Вилка с малым выносом при этих же условиях изменит траекторию больше, чем на три
градуса.
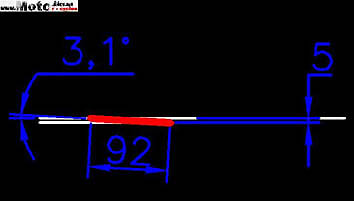
Значит, чем больше вынос, тем хуже аппарат реагирует на случайные колебания
вилки, тем меньше он "по сторонам шатается", тем более устойчивым себя
проявляет.
Однако у двух разных аппаратов может быть одинаковый вынос, но при этом один
может быть устойчивым, другой управляемым. Значит, не выносом единым стоит
мотоцикл. Можно сказать, что на устойчивость влияет еще и база мотоцикла, высота
центра масс, ширина колес, люфты в подвижных соединениях, угол наклона вилки,
жесткость системы вилка-рама-маятник на скручивание и, наверное, еще много чего,
вплоть до размещения багажа.
Но как тогда оценить устойчивость? Для этого придумали высчитывать некий
Коэффициент Устойчивости (К.У.). Он определяется делением самого Выноса на {Базу
/вместе с/плюс Вынос} (или делением выноса на расстояние между точкой контакта
заднего колеса с дорогой и точкой контакта оси рулевой колонки с дорогой).
Например, для первой модели этого раздела К.У. составит 126/1775=0,07. Это число
принято множить на сто и говорить 7%. (Какой К.У. считается нормой и для каких
типов аппаратов рассмотрим в конце статьи. Пока же примем, что для нашей модели
7% это есть норма.)
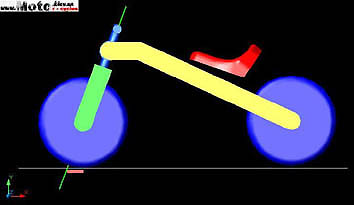
Если представить два мотоцикла с разной базой при прочих равных, получается
такая вот картина: при повороте переднего колеса (светло синяя линия) на
двадцать градусов (без крена самого мотоцикла покамест) эти два аппарата будут
немного по-разному себя вести. Аппарат с меньшей базой будет вписываться в
поворот с меньшим радиусом, более чутко реагировать на управляющие действия.
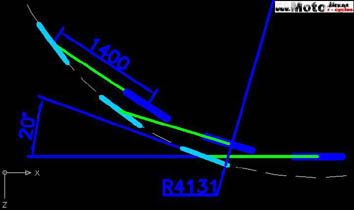
Но, зато аппарат с большей базой будет менее чувствителен к случайным колебаниям
вилки, проявляя свой более устойчивый характер.
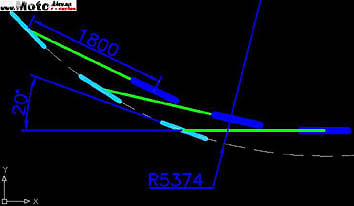
На этих схемках можно также обратить внимание на то, как заднее колесо реагирует
на уход переднего в сторону. Чем больше база, тем меньше заднее колесо рыскает
(движения из стороны в сторону) вслед за передним. Это еще одно проявление
устойчивости. И наоборот: чем меньше база тем "охотнее" заднее колесо следует за
передним, и тем легче таким аппаратом управлять. Да и потом следует понимать,
что база не появляется ниоткуда и не исчезает в никуда: Шутка про закон
сохранения энергии. А смысл шутки в том, что чем больше база тем не стабильнее
конструкция в целом (система вилка-рама-маятник), слабее на скручивание, и тем
более эта самая конструкция подвержена скручивающим колебаниям, и тем менее
чутко реагирует мотоцикл в целом на рулевое управление, но зато "ровнее стоит"
на траектории, не поймите пошло. И наоборот: чем прочнее ваш "дельтабокс" тем
послушнее снаряд реагирует на команды рулевого управления. Ясное дело, что тут
без фанатизма надо. Ни шибко мягкого, ни шибко твердого. Мягкое сгибается,
твердое, знаете ли и треснуть может: ( Вона штуцера (перцы, спецы, рейсеры...
замени своим словом) какие-то сотворили углепластиковую (карбон) раму с
маятником. Вроде идеал управляемости должон получиться, ан - нет! Испытатели
сказали: нафиг: Нельзя ехать на идеально жестком снаряде, пропадает обратная
связь с болидом, не чувствует его пилот:)
При эксплуатации мотоцикл меняет свою геометрию даже при разгоне и торможении.
Соответственно меняется и вынос и база и устойчивость-управляемость.
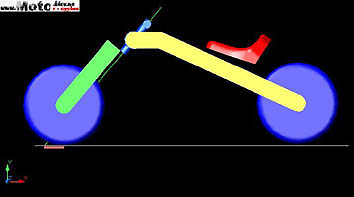
Представим себе, что аппарат тормозит. Он при этом немного клюет вперед. Обожмем
на нашей схемке полностью передние амортизаторы, и посмотрим, как меняется при
этом вынос вилки.
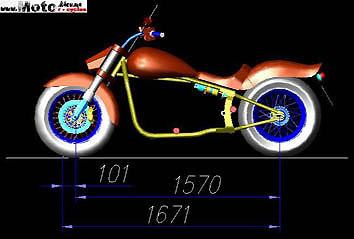
На схеме хорошо видно, что вынос уменьшился со 126 до 101мм , но уменьшилась и
база. Теперь К.У. составит 101/1671*100=6,04%., в отличие от семи процентов на
"свободном" аппарате (первая модель этого раздела).
Выходит, что при торможении аппарат становится более управляемым, но и менее
устойчивым. То же самое происходит, если размещать на баке багаж, если "задирать
байку зад", если крепить траверсы ниже, чем положено.
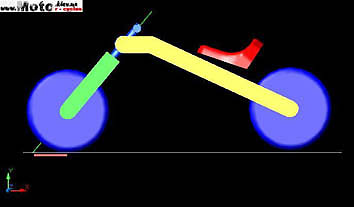
При разгоне, удлинении перьев вилки, сильной загрузке багажника (заднего:), при
переборе с кофрами, если ставить сзади короткие амортизаторы, и другими
способами присаживать заднюю часть мотоцикла, ситуация меняется с точностью до
наоборот:

На схеме видно, что на таком аппарате вынос увеличивается со 126 до 147мм.
Изменится и К.У., который был 7%, а станет 147/1801*100=8,16 и, соответственно,
аппарат становится устойчивее, но им тяжелее управлять. Да и практически если
сильно нагрузить багажники то ехать тяжелее, но на скорости аппарат стабильнее
себя ведет: это наверное каждый на себе испытывал:
Еще бывает, что люди (часто такие же днепроведы, как и автор) ничего больше не
меняя в мотоцикле, решают, что им просто дышать не моги, если они маятник не
сделают длиннее. В этом случае увеличивается база, но вынос особо не меняется.
При этом К.У. - делает ку-ку. Если он был (вверху) 147/(1653+147)*100=8,16 , то
после удлинения маятника на 100мм. станет 147/(1753+147)*100=7,73 , а значит, по
сравнению с прежним аппаратом, вы потеряете в устойчивости. В управляемости, как
для тяжелого аппарата, с низким центром тяжести вы при этом не очень-то
приобретете.
Такие вот мысли посещали той ночью папу-байкера.
Еще папе-байкеру было интересно: как объяснить малышу, почему это умные
дяди-инженеры, не учитывают в формуле угол наклона рулевой колонки? Ведь рано
или поздно малыш спросит и об этом.
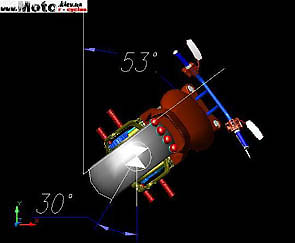
И тогда папа решил разобраться и с этим вопросом. Для начала решил папа перемыть
косточки углу наклона передней вилки. Решил он посмотреть, как реагируют
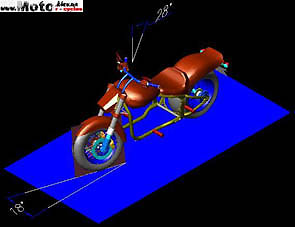
аппараты с разным наклоном вилки на одинаковые действия пилотов. Допустим, пилот
не наклоняет аппарат, а только лишь повернул руль на двадцать градусов. Вокруг
рулевой колонки повернул. Повернул руль и заметил, что плоскость колеса
отклонилась относительно общего направления меньше чем на двадцать градусов.
Чтобы замерить, на сколько меньше, папа в переднем колесе построил плоскость и
начал мерить угол между продольной осью и линией пересечения колесной плоскости
с асфальтом. Для начала вилка имела наклон в 28 градусов. И когда руль
повернулся на 20 градусов, плоскость колеса на самом деле повернулась на 18
градусов.
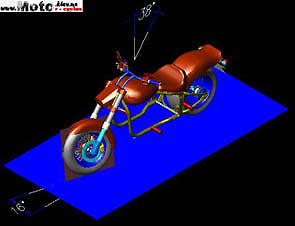
После "замеров" вилку поставили под углом 38 градусов. Руль, по прежнему,
повернут на двадцать градусов, а плоскость колеса повернулась уже на 16
градусов.
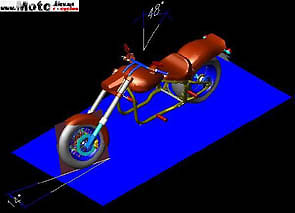
Потом было 48 градусов:
И даже 58:
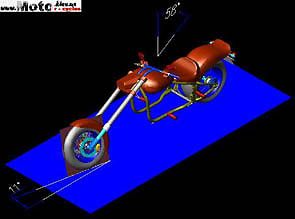
Модельки держали ровно, просто для того чтобы сравнить и понять: Чем дальше
вилка вперед, вынесена (только не надо путать вылет с выносом, потому, что это
одно и то же :) ), то есть, чем больше вилка "наклонена далеко вперед", тем хуже
она руля слушается при прочих равных.
На самом деле, ясное дело, мотоцикл в поворотах всегда наклоняется, и тем самым
поворачивает гораздо быстрее (эффективнее - и пусть автомобилистов жаба давит :)
). Если вилка наклонена на 38 градусов, и руль повернут на все те же 20
градусов, как и раньше, да еще и мотик наклонить градусов на тридцать, тогда
плоскость колеса (относительно направления движения) отклонится уже не на 16, а
на целый 21 градус.
Вот и выходит, чтобы аппарат вас хорошо слушался, надо вилку наклонять поменьше,
а байк в поворотах - побольше. Но ведь если вилку не наклонять, тогда уже байк и
не байк вовсе будет, а просто мотоцикл. Значит, во всем должна быть золотая
середина.
Ну хорошо с "вылетом" вилки аппарат хуже будет "руля слушаться" , так сказать
коэффициент послушности (управляемость) уменьшиться: А как собственно наклон
вилки с выносом связан? Одной цепью? В самом принципе своем передняя подвеска
мотоцикла есть подвеска Самоориентирующаяся - подвеска которая стремиться
развернуться(сориентироваться) в направлении движения, при начале самого
движения. Разворачивает ее, или ориентирует, или удерживает в направлении
движения некая сила сопротивления (это если забыть про гироскопический эффект, о
котором папа-байкер особо пока не задумывался:), но даже не то, чтобы собственно
разворачивает, а создает крутящий момент. А чтобы этот самый крутящий момент
создавать (с центром вращения в рулевой колонке) эта самая сила сопротивления
должна еще и плечо определенной длинны иметь. И вот, если представить, что это
самое плечо (салатового цвета) и эта самая сила сопротивления одинаковы для пяти
вилок, то тогда понятно, почему с наклоном вилки растет и вынос (красного
цвета). Потребный для создания этого самого одинакового плеча, потребного для
возникновения этого самого одинакового момента, потребного для разворачивания
вилки в сторону движения, потребного для самоориентации, потребной для
устойчивости в пути.
И только собрался передохнуть от бессонницы замученный своими мыслями
папа-байкер, как тут следующая ему с потолка мысль прямо по голове - бабах! И
ничего папе не оставалось выбора, кроме как думать эту самую новую мысль.
"А почему это крутые фирмы на свои аппараты кинулись, было, красивые и
правильные такие колеса ставить, пошире колеса, а потом опять их немного сузили
на спортах своих. Странная однако тенденция: Моторы в мощности растут, а колеса
поуже выбирают: Не иначе как и тут с устойчивостью-управляемостью мутка есть.
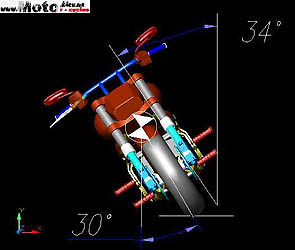
Решил теперь посмотреть какая разница между его аппаратом (а аппарат у него был
правильный по части колес, с широкими колесами, эдак 240х40х18 от господина
МецелЕра) и обычным мотоциклом с обычными не широкими колесами. Представил наш
пилот что аппараты с одинаковой массой и одинаковой высотой центра этой массы
(при какой-то одинаковой скорости и проходя по одинаковому радиусу поворота)
должны бы наклонять свой центр тяжести, относительно точки опоры градусов эдак
на 30 (и все эти жертвы только ради компенсации центробежной силы, которая
появляется (ну никак без нее) если не прямо ехать, а по радиусу в повороте
двигаться). И увидел тогда байкер, что когда колеса наклоняются, эта самая точка
опоры в сторону уходит. И если колесо не широкое, то всего ничего уходит, но
аппарат все равно приходится наклонять немножко больше, где-то на 34 градуса
наклонять, чтобы центр тяжести всего лишь на тридцать наклонился.
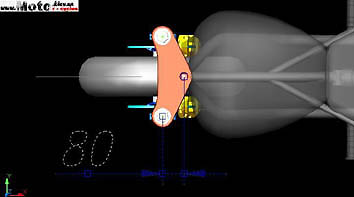
Но когда посмотрел папа-байкер, что творится с широким колесом при поворотах, то
ваще чуть не обомлел. При всех тех же условиях движения, аппарат понадобилось
наклонять уже аж на 42 градуса, и все из-за смещения пятна контакта на
широкопрофильных колесах.
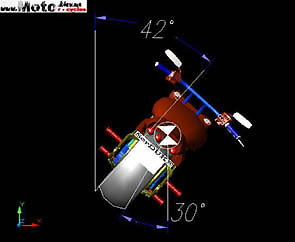
Выходит, что чем шире катки, тем больше Потребный Угол Наклона аппарата - угол
на который должен наклониться аппарат, чтобы центр тяжести наклонился
относительно опоры в сторону поворота для компенсации силой тяжести центробежной
силы от движения по кругу(радиусу) с определенной скоростью при прочих равных
условиях.
И этот вывод не понравился папе-Настоящему-байкеру. Вилку не выноси, колеса
широкие не ставь,.. А в чем кайф тогда в жизни кроме пива и женщин?
Но потом он спохватился. Опомнился можно сказать. И радостно стало у него на
душе! Понял он, что на самом деле не надо ему спортивной управляемости, а
счастлив он оттого, что аппарат его никакие силы с пути истинного не сорвут,
скорее крышу сорвут эти силы, чем столкнут байк с дороги. И колеса широкие как
раз и есть помощники в этом не последние, ведь они аппарат Устойчивее делают.
Автомобильный профиль делает аппарат "скользким", само колесо неустойчивое в
повороте.
А ежели у аппарата еще и центр тяжести пониже организовать, тогда он и вовсе как
айсберг на дороге стоять будет, и никакие Титаники такому аппарату на пути не
страшны: Управлять, правда, может и тяжело будет, но кого это волнует? Не для
того широкие катки ставят, чтобы меж машин шнырять! Да машины сами в стороны от
таких катков отпадать будут!
Но все же, так, для статистики, решил посмотреть папа-байкер на сколько надо
наклонить аппарат в тех же условиях как и раньше, но с более низко расположенным
центром тяжести.
Оказалось, что на 11 градусов больше. Оказалось, что чем ниже у аппарата центр
тяжести, тем больше надо наклонять этот аппарат в повороте при прочих равных
условиях. И наоборот, чем выше центр тяжести, тем легче аппарат заныривает в
повороты, тем легче ему крутиться в лабиринтах поворотов. Вот и выходит, что при
всем своем огромном желании не получится аппарату с красивой(длинной) вилкой, да
с могучими колесами, да с тяжелыми: (ну вы знаете что там у нас внизу) повороты
проходить на большой скорости. На таких аппаратах медленно надо ездить и
солидно, чинно и благородно.
Вот мы тут говорили про потребный угол наклона двухколесных в повороте. А вот
интересно, откуда он берется этот потребный угол? Хорошо. Представим себе, что
наш аппарат катит по какой-то дуге… В школе всем нам говорили, что при движении
по окружности на тело воздействует центробежная сила. Это сила из-за которой тело
стремится "убежать" подальше от центра дуги.
И чтобы наш байк не выбрасывало из поворота (на больший радиус), нужно нечто,
что могло бы уравновесить движение. Ведь стабильное движение возможно только при
равновесии всех сил, воздействующих на тело.
Например, сила сопротивления и сила тяги двигателя уравновешиваются, порождая
равномерное движение с определенной скоростью. Вырастет тяга (если "газу дать")
– вырастет и скорость. Подрастет скорость – подрастет и сопротивление, пока не
уравновесится с новой тягой. Аэродинамическое сопротивление воздуха растет
гораздо быстрее, чем скорость, ведь оно пропорционально не скорости а ее
квадрату, т.е. скорости, умноженной на скорость. Скорость в два раза,
сопротивление – в четыре, скорость в три, сопротивление – в девять… Вот почему
мощность байков растет как грибы, а их скорости так и пляшу меж 200 и 300 км/ч.
А что же в повороте уравновесит центробежную силу? Все та же старая добрая сила
тяжести. Как? Да вот так (слева направо):
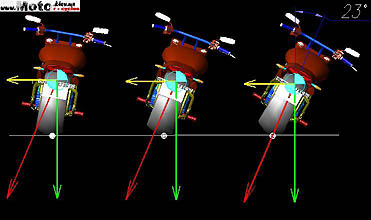
на заданном постоянном радиусе при заданной постоянной скорости возникает
постоянная по величине центробежная сила (желтая стрелка, или вектор, если
угодно). В сумме с силой тяжести (тоже постоянная величина, зеленый вектор) они
порождают результирующую красную силу. Аппарат движется в повороте стабильно с
таким наклоном, при котором результирующая проходит через точку опоры. Так мы и
пришли к потребному углу наклона аппарата, здесь это 23 градуса. Угол меньше –
вылетаете с поворота (на больший радиус), больше - заваливаетесь в поворот еще
сильнее (на меньший радиус). Свешиваясь в сторону, вы смещаете центр тяжести
системы, наклоняя его(центр) а не весь мотоцикл, даете возможность резине
"держаться".
Ну и как это все связано с размышлениями нашего бедолаги папы-байкера?
Шизофренией, батенька, шизофренией… Говорят, это когда одна мысль порождает
другую, та – третью и т.д. Но здесь легче: движение двухколесных в повороте
напрямую связано с выносом. Войти в поворот можно либо наклонившись в сторону
поворота, и тогда именно вынос сделает свое дело, либо – малехо повернув руль в
другую сторону, мы "уводим колеса" из под центра тяжести системы и этим
порождаем наклон, в котором и поворачиваем. Вспомним опять езду на велике "без
рук". Когда мы едем не касаясь руля, нам достаточно наклониться немного в
сторону поворота и велик начинает потихоньку сворачивать в поворот. Если мы
хотим повернуть, скажем, направо, но при этом едем медленнее – тогда наоборот:
сначала идет быстрый рывок-наклон влево, и когда колеса "уходят из под нас"
левее, мы получаем достаточный наклон, чтобы быстро повернуть вправо. Когда мы
стоим и держим велик за сидушку, он не реагирует ни на что. Если начнем
наклонять его на месте влево (заваливать) , руль не то, чтобы сам повернется, а
скорее упадет в ту же сторону. И чем больше вынос, тем сильнее повернется руль.
В движении руль не "падает", а только немного доворачивается в сторону наклона.
И чем больше скорость, тем медленнее. Чем быстрее крутится колесо (чем больше
скорость), тем труднее повернуть руль. Виной тому гироскопический эффект. Все мы
игрались с юлой – маленьким гироскопом. Больше скорость ее вращения и масса –
стабильнее стоит на столе. То же самое и с колесом, только оно не в
горизонтальной плоскости вращается, а в вертикальной. И чем быстрее оно
крутится, и чем тяжелее оно, тем ровнее будет катиться, тем медленнее
поворачиваться.
Помните, чем больше вынос, тем сильнее повернется руль у стоящего на месте
велика? И чем больше вынос, тем сильнее (наклоненный) аппарат будет доворачивать
вилку в сторону поворота, чтобы выровняться. Будет проявлять свой устойчивый
характер, и тем самым затруднять прохождение поворотов. Соответственно, чем
вынос меньше тем "охотнее" двухколесник будет входить в повороты и в них
держаться. Если вынос недостаточен, аппарат "не захочет" выходить из поворота, и
это уже неуправляемость с неустойчивостью вместе.
Но чем больше скорость тем медленнее аппарат реагирует на наклоны, тем сильнее
из наклонов вырывается, тем более ровно стремится ехать. В том числе и из-за
колеса-гироскопа. Значит в выборе величины выноса надо еще и преобладающие
скорости аппарата учитывать. Так сказать настройка на скорость.
Сказка третья - практическая.
И так, нафига написано все выше следующее?
Как сказал давным-давно Герберт Спенсер: "Великая цель образования, не знания, а
действия ".
А в чем же действия? В настройке(тюнинге) да переделке(стилизации/стайлинге) с
сохранением правильной геометрии.
Допустим, не нравится вам устойчивость или управляемость вашего аппарата, или вы
меняете геометрию (ну там длинный маятник, наклон и длинна вилки), или вовсе
строите собственную тачилу, обратите внимание на соответствие получаемого К.У. и
вашего будущего зверя. Один из способов (мой любимый) смоделировать конструкцию
на компьютере, дабы потом и чертежи получить, и результат понимать. Другой
способ, более надежный в силу своей практичности это - делать-мерить-рихтовать.
Берете вы раму, ставите на подставку так, как в "натуре" стоять будет,
монтируете маятник, заднее колесо, вставляете в рулевую колонку соответствующую
трубу. Наклон вилки учтен при сварке(переделке) самой рамы. Там, где труба об
земля обопрется, начинаете мерить: И меряете до точки контакта заднего колеса с
опорой(землей). Только начальное обжатие задних амортизаторов (если они есть) не
забудьте учесть.
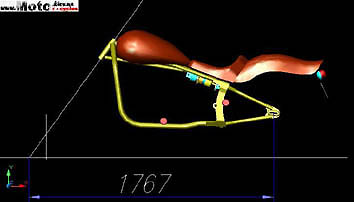
Зная нужный вам коэффициент устойчивости, скажем 7.5%, берете именно 7.5
процента от полученной величины 1767мм, что составит 132,5мм. Это и будет нужный
вам вынос. Дальше проводите линию в 133 мм от пересечения вспомогательной трубы
назад. (Расстояние от найденной точки до опоры заднего колеса - будущая база
вашего аппарата, которая приблизительно все-таки должна соответствовать
задуманной, спроектированной величине). Из найденной точки строите вертикаль
длинной равной радиусу колеса, или гораздо проще ставите само переднее колесо
строго на найденную точку. И меряете расстояние от оси колеса до оси рулевой
колонки, которую сейчас нам вспомогательная труба временно заменяет: Только
меряете расстояние не до трубы, а до оси этой трубы.
Собственно найденная величина и есть весь ваш расчет траверс. Именно такое,
найденное вами расстояние, должны обеспечивать траверсы между осью рулевой
колонки и плоскостью траверс.
Лишь бы длинны вилки хватило: Обычно берут уже готовую вилку. И предварительно
прочертить все в натуральную величину очень даже не помешает.
Если вы проектируете вилку ну с оч-чень большим наклоном, ваш расчет не будет
сильно сложнее. Но все-таки не поленитесь прочертить все это в натуральную
величину на миллиметровой бумаге, не такой уж это и дефицит, а проектировать на
коленке вам обойдется на порядок ( это значит в десять раз ) дороже.
Вернемся же к выносу, а точнее к коэффициенту устойчивости. Каким он должен быть
для вашего аппарата? Думаю туточки вам поможет статистика. Какой у вас тип
аппарата, вы, надеюсь, знаете, чего вы хотите добиться от него по части
устойчивости-управляемости тоже вроде вам уже ясно: Большой вынос сделаете -
получите драгстер, езяющий только прямо, не способный поворачивать; маленький
вынос - мотик забодает вас на малейшем дальняке своей неустойчивостью, и, что
еще страшнее - (наряду со спущенными шинами, высокопрофильными шинами,
недостаточной жесткостью вилки и мотоцикла, малым диаметром колес, плохой
аммортизацией) недостаточный вынос будет провоцировать автоколебания передней
подвески, это чревато. Особенно при торможениях. Имея длинную, с большим
наклоном вилку с нехилым ходом амортизаторов, и делая вынос "впритык" вы так же
рискуете в торможении прийти к тому же.
В мире произведено уже тьма типов, видов, классов (и т.д.) аппаратов, на которые
всегда можно найти тест-драйвы и технические данные. Небольшая табличка была в
журнале "Мото"(март 2002):
| Модель |
Класс |
Угол наклона вилки |
База |
Вынос |
К.У. |
| |
|
|
|
|
|
| Honda CBR600F |
спортбайк |
24 |
1395 |
96 |
6,4 |
| Kawasaki ZX12R |
спортбайк |
23,5 |
1440 |
93 |
6,1 |
| Yamaha YZF-R1 |
спортбайк |
24 |
1395 |
92 |
6,2 |
| |
|
|
|
|
|
| Suzuki GSF600 BANDIT |
класик |
25,2 |
1430 |
100 |
6,5 |
| Kawasaki ER-5 |
класик |
27 |
1430 |
102 |
6,7 |
| Yamaha XJR1300 |
класик |
25,5 |
1500 |
100 |
6,3 |
| |
|
|
|
|
|
| Honda VF750C |
круизер |
32 |
1660 |
135 |
7,5 |
| Suzuki VL1500LC |
круизер |
32 |
1700 |
138 |
7,5 |
| Yamaha XVS1100 |
круизер |
33 |
1640 |
136 |
7,65 |
Есть у меня еще большая куча данных из "Моторад Ньюс", но их привожу здесь с
опаской, в силу большого количества ляпов в этом журнале. Да и в классификации,
может какой не в ту группу задвинул :)
| Спорты |
| Honda CBR 600F |
1395 |
96 |
24 |
6,44 |
| Yamaha YZF-R1 |
1395 |
92 |
24 |
6,19 |
| Triumpf DAYTONA 955i |
1440 |
81 |
22,8 |
5,33 |
| Suzuki GSX-R 1000 |
1410 |
96 |
24 |
6,37 |
| Нейкед |
| Honda Hornet 900 |
1460 |
98 |
25 |
6,29 |
| Triumpf Speed Triple |
1429 |
84 |
23,5 |
5,55 |
| Yamaha YZS 1000 |
1450 |
104 |
26 |
6,69 |
| Боль-мень повседневники, спорттуреры, туреры и круизеры |
| Suzuki SV 650 |
1415 |
100 |
25 |
6,60 |
| Cagiva RAPTOR 650 |
1440 |
109 |
25 |
7,04 |
| Suzuki GSF 1200 S |
1430 |
104 |
26,3 |
6,78 |
| Kawasaki ZRX 1200 S |
1465 |
106 |
26 |
6,75 |
| Yamaha FZS 1000 FAZER |
1450 |
104 |
26 |
6,69 |
| Triumpf BONNEVILLE |
1493 |
117 |
29 |
7,27 |
| Kawasaki W650 |
1450 |
105 |
26,5 |
6,75 |
| BMW K1200 RS |
1555 |
124 |
27,2 |
7,39 |
| Yamaha FJR 1300 |
1515 |
109 |
26 |
6,71 |
| BMW K1200 LT |
1633 |
109 |
25 |
6,26 |
| Honda GOLD WING 1500 |
1690 |
111 |
30 |
6,16 |
| Honda GOLD WING 1800 |
1692 |
109 |
29 |
6,05 |
| HD Electra Glide Road Ring Classic |
1612 |
156 |
26 |
8,82 |
| Yamaha VENTURE |
1705 |
152 |
29 |
8,19 |
| Kawasaki VN 1500 |
1665 |
189 |
32 |
10,19 |
| Kawasaki VN 1500 MEAN STREAK |
1705 |
144 |
32 |
7,79 |
| Suzuki VOLUSIA 800 |
1645 |
141 |
33 |
7,89 |
| amaha XVS 1100 Y |
1643 |
145 |
33 |
8,11 |
| HD V-ROD |
1713 |
99 |
34 |
5,46 |
| Кросики и эндурики |
| Suzuki DR-Z 400S |
1475 |
109 |
28 |
6,88 |
| Yamaha TT 600R |
1490 |
114 |
27 |
7,11 |
| Honda XL 650V TRANSALP |
1505 |
108 |
28 |
6,70 |
| KTM DUKE-II |
1460 |
125 |
25,8 |
7,89 |
| KTM SUPER MOTO |
1510 |
118 |
27,5 |
7,25 |
Ну вот, собственно и все. В конце обычно делают выводы или толкают
наПУТЬственные речи: Только молод еще автор учить кого-нть. Так поделился
мыслями:
Удачи! И если эти мои сказки Вам хоть в чем-то помогут, буду только рад.
Да, кстати! Чуть не забыл.
Сказка последняя - мудрая и философская...
Утром, когда наш маленький мальчик проснулся, он выслушал все, что надумал наш
папа-байкер за ночь. Тем временем пришел уже вечер и мальчик сказал :"Да пап,
колбасило тебя ночью: Мотоцикл не падает потому, что ты его в гараже об стеночку
опираешь или на подножку ставишь!.."
P.S. Дополнительно про вынос смотрите:
Журнал "МОТО" за март 2002 года, стр. 42 "Умей вертеться"
"Подними выше нос"
Автор:
Статья предоставлена
УСТОЙЧИВОСТЬ, УПРАВЛЯЕМОСТЬ И КАК ИМИ ПОЛЬЗОВАТЬСЯ
(мото 0б/94 16)
Что же такое устойчивость? Когда кто-то хвастает: «Тачка
стоит на шоссе классно!» — мы и не думаем, что хвалят дачную тачку для
транспортировки навоза, а молниеносно соображаем: это — о мотоцикле. И
отнюдь не о способности его стоять на подставке! Жаргон точен, для
сомнений места не оставляет. Но заглянуть в умную книгу все же не
вредно.
Итак... «Способность мотоцикла сохранять во время
движения направление, заданное водителем, и положение относительно
дороги называется устойчивостью».
Тут так и подмывает кого-то спросить: если ты закрепишь
руль жестко, будет «ИЖ» (ММВЗ, БМВ...) устойчив? Ты же ему поможешь
сохранить направление!
Ладно, не будем торопить события. Всех нас угораздило
родиться в трехмерном мире, — как ни мудри, от трех координатных осей —
продольной, вертикальной и поперечной — никому из нас убежать не
суждено. Остается жить в их сетях... Они, между прочим, равноправны, а
поэтому и мотоцикл должен быть устойчив по отношению ко всем трем.
Значит, он не должен никуда сворачивать, не должен ложиться на бок, не
должен опрокидываться вперед или назад.
Здесь мы будем говорить об устойчивости относительно
продольной и вертикальной осей. И каждому, конечно же, хочется, чтобы
эти свойства машины сохранялись не только на ровной дороге, но и на
любой другой.
Какие требования предъявляем мы к мотоциклу, например,
на повороте? Если скорость, угол наклона, радиус траектории друг с
другом согласованы и постоянны, устойчивый мотоцикл легко сохраняет эти
параметры движения, а при их изменениях ведет себя логично, «как надо».
Например, на повороте упала скорость,— равновесие могло
бы нарушиться, но руль сам начнет поворачиваться внутрь поворота,
уменьшая радиус траектории и приводя действующие силы к равновесию. В то
же время опытный водитель знает, что для устойчивого мотоцикла, пожалуй,
характерно некоторое нежелание выходить из установившегося режима
движения, сопротивление слишком резким движениям руля.
В реальной жизни поворот — это всегда сочетание
нескольких режимов,— уже хотя бы потому, что радиус траектории должен
измениться от бесконечно большого до какого-то минимального, а потом
вновь увеличиться до бесконечного.
Значит, мотоциклисту на повороте приходится действовать и газом, и
тормозами, и рулем,— пройти успешно поворот с зафиксированными органами
управления невозможно.
В особой цене вышеозначенные качества мотоцикла у
всякого, кому доводится ездить по хорошим горным трассам, — когда
покрытие шоссе соблазняет дать газу побольше, а многочисленные виражи
этому мешают. Тут устойчивая машина — половина успеха, братцы туристы.
Для наших моторизованных ветеранов устойчивость
мотоцикла — это синоним такого понятия, как «ИЖ-49». Впрочем, мотоцикл,
с этой точки зрения, действительно был что надо. На сельских, отнюдь не
самых гладких, дорогах он позволял совершать чудеса. Бывало, доярки,
свинарки, огородницы, учетчицы просто млели, завидев на горизонте
характерное облако пыли,— через минуту из него вынырнет первый парень на
деревне и, приметив зрителей, выполнит обычную программу,— то есть
отпустит руль, достанет портсигар, вынет «беломорину», закурит, угостит
пассажира, а «ИЖ», деловито стрекоча, пронесет их мимо... Шикарная,
прямо скажем, картина! Рытвины, кочки, собаки, свиньи на дороге — ну
все,
все «ИЖу-49» нипочем!
Итак, устойчивость двухколески связана с движением, это
факт. Спросите любого четырехлетнего ребенка, он вам объяснит!
Остановившись, двухколесный «велик» стоять не может, падает. Правда,
иной читатель тут может нас «уесть» таким доводом,— я, мол, видел
соревнования по триалу, — там мотоциклист запросто сохраняет равновесие,
стоя на месте, ног не опуская, а вы мне тут голову морочите! А мы ему
свой довод: не пора ли научиться отделять мух от котлет?
То, что ты видел, объясняется талантом спортсмена, его ловкостью, а не
противоестественными
свойствами мотоцикла. Их нет. Мотоцикл для триала сам по себе, без
движения, на двух точках опоры тоже не стоит.
Когда мотоцикл движется с малой скоростью, устойчивость
обеспечивается преимущественно непрерывным маневрированием,— строго
говоря, мотоцикл, двигаясь по прямому шоссе, выписывает на нем совсем не
прямую траекторию, — она тем ближе к прямой, чем выше точность
управления. Изображая пьяницу за рулем, карикатуристы справедливо
показывают след машины в виде широкого зигзага. Это, понятно, другая
крайность, показывающая, что самочувствие человека никудышное. Точно так
же иной раз едет и попросту больной водитель,— не зря же это запрещено
правилами?!
Словом, устойчивость двухколески на малых скоростях
чрезвычайно сильно зависит от личных качеств водителя. А с повышением
скорости?
Кто-то однажды сказал: с высокой скоростью по прямой
улице и дурак (ах, простите!) проедет.
Именно так и получается, только мотоциклу не мешай. Конструкция, если
машина исправна, сама обеспечивает стабилизацию, устойчивость на высоких
скоростях.
Думается, одним из важнейших для транспортной техники
изобретений после появления на земле колеса историки когда-нибудь
признают такую штуку, как поворот переднего управляемого колеса
велосипеда или мотоцикла вокруг не вертикальной, а наклонной оси. Это
решение оказалось, без преувеличений, почти гениальным!
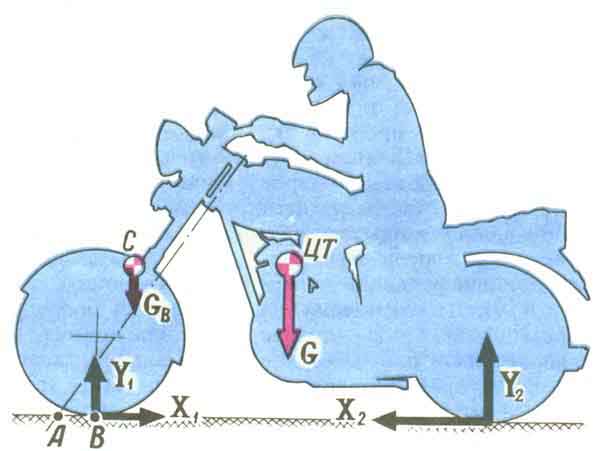
рис.1. Силы, действующие на мотоцикл. Обозначения:
ЦТ - центр тяжести;
С - центр тяжести группы деталей передней вилки;
G - общий вес мотоцикла с водителем;
Gb - вес группы деталей передней вилки;
Y1 и Y2 - вертикальные реакции на колесах;
X1 и X2 - продольные реакции на колесах
Хотите убедиться? Давайте начертим схематически наш
мотоцикл, без формул и графиков, попроще (рис. 1).
Здесь GB — вес группы деталей, которые при повороте руля вращаются как
целое вокруг оси рулевой колонки,— равнодействующая сил веса вилки, фары
и т. д. сосредоточена в точке «С» — обычно несколько впереди оси
поворота. Полный вес машины приложен в точке «Ц.Т.» (центр тяжести),— их
величину и положение определяют вертикальные реакции Y1 и Y2 на колесах.
Ясно, что сумма этих реакций численно равна полному весу. Теперь
заметьте, что сила Y1 приложена к колесу в точке «В» контакта (точней,
это центр пятна контакта шины), смещенной существенно назад относительно
точки «А» пересечения оси рулевой колонки с поверхностью дороги.
Расстояние между этими точками — это так называемый вылет вилки.
Силы X1 и Х2 — продольные реакции на колесах при
прямолинейном движении мотоцикла.
Что дает нам вылет вилки? Если начать наклонять мотоцикл
при положении руля «прямо», силы
Y1 и Gb, выйдя из плоскости симметрии мотоцикла, вынуждают вилку
повернуться в сторону наклона.
Именно этому каждого из нас когда-то учили, впервые посадив на
двухколесный велосипед:«руль крути туда, куда он наклоняется!»
Сейчас, когда кто-то додумался оснастить велосипед
малыша дополнительными колесиками с боков,
это лишь отдаляет тот счастливый день, когда ребенок, поехав на двух
колесах, ощутит красоту
свободного движения! Что поделаешь, — когда толпы граждан стояли в
очереди за умом, некоторые «конструкторы» побежали в очередь за пивом.
Доказано ведь: малыша четырех лет от роду научить ездить на двухколеске
можно в считанные минуты.
Что еще происходит при наклоне мотоцикла? Обратите
внимание на следующий эффект: так как шины имеют определенный профиль
сечения и ширину, при наклоне мотоцикла пятно контакта смещается от
плоскости симметрии в сторону наклона,— если при наклоне опрокидывающая
и выравнивающая силы сбалансированы, увеличение ширины шины заставляет
дополнительно увеличивать наклон (см. рис. 2).
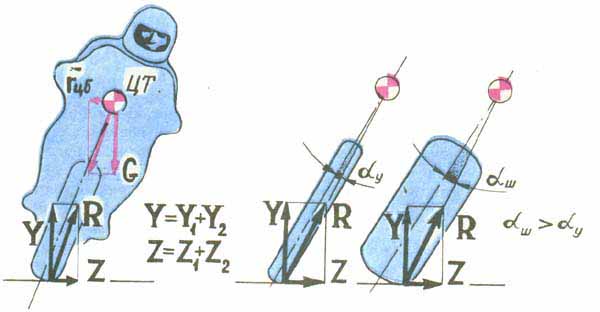
рис.2. Влияние ширины шины на потребный наклон мотоцикла из-за
смещения пятна контакта.
Мотоцикл на широких шинах требует большего наклона на
повороте, при ассиметричной нагрузке, боковом ветре.
А что будет происходить, если вы станете поворачивать
руль, не нарушая вертикального положения мотоцикла?
Во-первых, пятно контакта передней шины смещается в
сторону, противоположную повороту, линия, соединяющая оба пятна
контакта, смещается относительно центра тяжести,— и тут уж появится
сила, стремящаяся наклонить мотоцикл в сторону поворота, помогающая
водителю.
Во-вторых, поворот вилки означает переход к движению по
криволинейной траектории,— значит, появится соответствующая этому
центробежная сила. Если ей ничего не противопоставить, она опрокинет
мотоцикл в сторону, противоположную повороту. Чтобы избежать этого,
мотоцикл наклоняют в сторону поворота. Как эти эффекты ладят между
собой?
Если ехать с самой малой скоростью, центробежная сила,
зависящая от квадрата скорости,
настолько мала, что компенсируется эффектом номер один,— плавный поворот
на малой скорости выполняется практически без наклона мотоцикла.
Напротив, с ростом скорости центробежная сила настолько возрастает, что
для ее компенсации не только эффекта номер один мало, но требуется еще и
большой дополнительный наклон мотоцикла. Последний еще больше вырастает
из-за влияния на эту картину сил профиля шины и ее ширины.
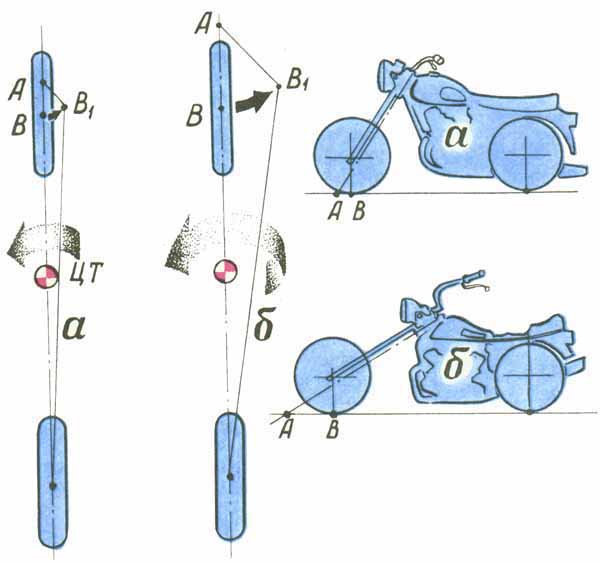
рис.3. Смещение пятна контакта передней шины как результат работы
вылета вилки во время ее поворота.
Увеличение вылета вилки усиливает эффект номер один
(рис. 3), в то же время сильно наклоненная вилка уменьшает эффективность
управления за счет непосредственного поворота колеса (вообразите для
ясности, что вилка поворачивается вообще вокруг продольной оси,— что
получится?!),— значит, при повороте вилки здесь центробежная сила
нарастает не так резко. Иными словами, от компоновки мотоцикла зависит
соотношение сил, влияющих на его устойчивость и... на наши ощущения. Как
вам известно, некоторые мотоциклы на Западе имели и имеют наклон вилки
гораздо больше нам привычного, а спрос, как известно, определяет
предложение. У этих мотоциклов-монстров немало горячих поклонников, —
подобная компоновка, нанося явный ущерб управляемости машины, делает
процесс ее стабилизации на высоких скоростях исключительно плавным. По
отзывам некоторых искушенных мотоциклистов,
такая машина чуть ли не сама входит в нужный вираж,— только покажи ей
рулем нужное опять-таки направление!
Неплохо?!
Вдумайтесь, как мы действуем, выполняя поворот.
Например, влево. На входе в поворот мы сначала наклоняем мотоцикл, а
затем уже поворачиваем руль, создав центробежную силу, которая
«подхватывает» машину, не давая ей упасть. А не наоборот!
Многие именно так и ездят,— особенно те, кто не любит
резкой, со спортивным азартом, езды.
Ездят, а над «нюансами» не задумываются,— ни к чему. Но этот способ
прохождения поворота,— простите! — далек от «высшего класса» пилотажа.
Если потребуется-таки резкий, очень резкий маневр, а мотоцикл тяжел, а
наш «эсэнгешний» водитель имеет жокейскую комплекцию, наклонить мотоцикл
при помощи собственного тела удастся нескоро,— можно и не успеть! И что?
Авария?
Зачем же! Давно изобретен способ управления, позволяющий
резко маневрировать даже на тяжелом мотоцикле-одиночке,— его очень не
любят нервные зрители и пенсионеры за «лихость», однако эффективности
ему не занимать.
Допустим, мы снова приближаемся к левому повороту,—
пройти его надо резче. В этом случае непосредственно перед поворотом
(момент этот определяется опытом, тренировкой) руль на мгновенье
поворачиваем на малый угол (опять-таки из опыта!) вправо — тотчас
возникнет центробежная сила, пропорциональная массе мотоцикла с
водителем, а потому даже жокей запросто «свалит» тяжелый мотоцикл влево.
Руль в это же мгновенье поворачиваем уже влево, меняя направление
центробежной силы на противоположное,— и вот достигнуто условие
прохождения поворота, то есть машина движется по заданной кривой, а
опрокидывающий и восстанавливающий моменты друг друга уравновешивают,
как им и положено на устойчивом мотоцикле.
Самое первое движение руля перед поворотом называют «контрсмещением»,
оно позволяет очень резко менять углы наклона мотоцикла, — например, в
ходе гонки, практически вне какой-либо зависимости от собственной массы
мотоцикла, не считая усилий на руле, конечно.
Как видите, мотоцикл с большим наклоном вилки — не для
тех, кто любит резкую езду, с энергичными маневрами. Есть у этой
«медали» и оборотная сторона — на реальных дорогах, в условиях
напряженного уличного движения большинство из нас предпочтет мотоцикл
нормальной, классической компоновки, с углом наклона оси вилки около 30°
от вертикали. Это обеспечивает оптимальные характеристики машины в плане
ее устойчивости и управляемости
(а эти два понятия очень часто входят друг с другом в противоречие). С
этой точки зрения вечные споры наших «ижистов», «явистов» или «паннонистов»
абсолютно беспочвенны, запасы устойчивости и управляемости наших
дорожных мотоциклов примерно одинаковы.
Итак, что же будет с мотоциклом, если при прямолинейном
устойчивом движении его отпустить на свободу? Если скорость не слишком
велика (эффект стабилизации за счет гироскопических эффектов колес
несущественный), мотоцикл в конце концов начнет валиться в какую-то
сторону. Например, снова влево. Но тотчас в дело вступит механизм
самостабилизации за счет вылета вилки,— переднее колесо довернется на
какой-то угол в сторону наклона, появится центробежная сила,
возвращающая мотоцикл к вертикали... Если дорога ровная, а мотоцикл
идеально отрегулирован, эти случайные отклонения настолько хорошо
самоликвидируются, что такая самостоятельная езда может быть довольно
успешной на горе окружающим.
Если механизмы мотоцикла работают не так четко, его
отклонения в ту или другую стороны могут быть большими, вплоть до того,
что падение произойдет почти сразу. Например, машина валится влево,
затем с запозданием резко возвращается к вертикали, после чего по
инерции валится уже вправо, потом снова возвращается к вертикали...
Процесс может прогрессировать,— отклонения от раза к разу сильнее, пока
машина не ляжет на бок.
А в общем, наш земной шар не настолько гладок, чтобы
самый идеальный мотоцикл мог самостоятельно ехать до исчерпания
бензобака! Да и не к чему нам с вами это.
Итак, поворот передней вилки около наклонной оси
чрезвычайно важен, если говорить об устойчивости мотоцикла.
Но вся связанная с ним «автоматика» восстановления равновесия может
отказать из-за некоторых неисправностей.
На мотоцикле-одиночке ничто не должно мешать плавному,
равномерному повороту руля, даже небольшое заедание в подшипниках
способно заметно ухудшить устойчивость. Чем более туго вращается руль,
тем труднее делать им точные, «ювелирные» движения — он поворачивается
скачками,а мотоцикл, естественно, рыскает в стороны.
Привычные нам демпферы сухого трения, приспособленные
для езды с боковым прицепом (да-бы такая машина меньше раскачивалась на
ходу вокруг вертикальной оси), на мотоцикле-одиночке не то, что
бесполезны, а скорей — вредны, так как создают трение в рулевом
управлении. Давно применяющиеся на многих мотоциклах западных стран
специальные гидродемпферы избавлены от такого недостатка, однако у нас
мало кому известны.
Остается лишь снова и снова разводить руками! А ведь они позволяют
получить нужные характеристики мотоцикла, — не мешая медленному повороту
руля, препятствуют резким рывкам, например, на неровностях дороги.
Чем еще «болеют» системы управления наших мотоциклов?
Очень распространен такой дефект (особенно на мотоциклах с солидным
пробегом) — износ колец подшипников руля. Беда в том, что шарики при
работе откатываются от своих средних положении на небольшое расстояние,
в результате чего со временем на дорожках качения появляются углубления,
куда шарики стремятся вкатиться в полном соответствии с законами физики.
И что же? При глубине таких
«лунок» в несколько сотых миллиметра руль уже начинает в каких-то
положениях заедать, едва лишь вы попробуете слегка подтянуть его гайку.
Перетянешь гайку — мотоцикл становится похожим на норовистого мустанга и
несет туда, куда ему удобней. Недотянешь — ехать противно из-за стуков.
Вот и выбирай...
Устойчивость мотоцикла-одиночки легко нарушить также в
случае, если он по какой-либо причине утрачивает свою одноколейность,—
иными словами, если заднее колесо не идет строго по следу переднего.
Часто это бывает результатом неумелой или небрежной регулировки
натяжения цепи, если при этом нарушается положение плоскости вращения
заднего колеса относительно рамы.
Что при этом получается? Взгляните на рис. 4,— ясно, что
мотоциклисту — так или иначе! — приходится ехать. Значит, если это —
прямолинейное движение, то колеса, строго говоря, идут каждое по своей
колее, но ведь рама-то, позвольте, не резиновая. Значит, в этом случае
передняя вилка должна быть повернута на некоторый угол, плоскость рамы
мотоцикла тоже повернута под определенным углом к направлению движения,—
в конечном счете переднее колесо с вилкой оказываются несколько
наклонены в сторону,— значит, неизбежно вступит в действие рассмотренный
нами механизм самовосстановления. Руль и вилка стремятся повернуться в
сторону наклона, мотоцикл не устойчив. Ехать на нем можно (человек, как
известно, к чему угодно привыкнет), но ценой тех или иных усилий. В
общем, это не подарок водителю.

рис.4. "Двухколейность" мотоцикла как следствие неправильной
установки колес, деформаций рамы, вилок и т.д.
Похожая картина получается при каких-то деформациях
рамы, передней или задней вилок. Возможна она и после неумело
проведенного ремонта колес, если при этом происходила их разборка и
сборка, — например, с целью замены спиц, барабана и т. п. Кто-то,
возможно, нас спросит: «Ну, а тут-то в чем можно напортачить?!»

рис.5. К вопросу о правильной сборке колеса.
Запросто можно. Мы и сами когда-то это «проходили».
Перед разборкой колеса надо непременно замерить расстояние «а» (см. рис.
5), а при сборке его, как ни трудно этого добиться, нужно достигнуть не
только минимального биения обода в осевом и радиальном направлениях, но
и правильного его положения по отношению к барабану, определяемого
замеренной величиной «а». Иначе потом, когда вы поставите колесо на
мотоцикл, шина окажется смещена от плоскости симметрии в сторону,— тогда
уж хорошей устойчивости
вы вряд ли дождетесь.
Устойчивость мотоцикла зависит также от того, как он
нагружен. Здесь можно говорить о разных факторах, с этим связанных. Иной
раз сама посадка водителя не способствует повышению устойчивости,—
кто-то, например, любит сидеть асимметрично, чуть-чуть бочком! Изящно,
даже красиво, если плюнуть на устойчивость. Физике же все равно...
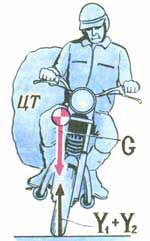
рис.6. Крен при прямолинейном движении из-за ассиметричной нагрузки
мотоцикла
Если мотоцикл нагружен асимметрично, — например,
перевешивает правый борт, как на рис. 6,
при прямолинейном движении наблюдается следующее. Действуют лишь
вертикальные силы,
поперечных нет, продольные значения не имеют. Мотоцикл для сохранения
равновесия
наклонен влево, ширина покрышек проявляется в том, что пятна контакта
колес еще больше
смещаются в сторону наклона, заставляя больше наклонять и мотоцикл. Но
вилка стоит прямо,
поэтому о смещении пятна контакта переднего колеса из-за ее вылета
говорить не приходится,
его практически нет. (Малозначительными эффектами, связанными с
неодинаковым профилем
шин, их частичным проскальзыванием, дополнительной деформацией и т.п.,
мы имеем
право пренебречь.)
Итак, силы Y1, Ya и G действуют не в плоскости симметрии
мотоцикла, а посему передняя вилка должна повернуться влево. Если ее
освободить, отпустив руль, мотоцикл скорей всего привезет вас не туда,
куда вам хотелось. Он неустойчив. Даже не разбираясь в этих тонкостях,
каждый ощущал неустойчивость из-за асимметричной нагрузки — когда руль
упорно «тянет» в одну сторону, не позволяя и на секунду расслабиться.
Ярко выраженный пример такого рода — езда с поднятой
коляской (для того, кто умеет, конечно).
Тут все происходит как на мотоцикле-одиночке, чудовищно перегруженном с
правой стороны. Каждый, кто так ездит, знает, какие усилия надо
«удерживать» рулем.
Читатель ждет морали. Она проста. Всегда помнить о
симметрии нагрузки! Даже, если с нею не хочет считаться ваша дама,
предпочитающая сидеть «амазонкой»,— это, конечно, пикантно, но... просто
опасно. Постарайтесь деликатно ей это разъяснить. Разумеется, главная
опасность связана с возможностью падения дамы на спину.
Э. КОНОП
Источник:
ГЕОМЕТРИЯ ЧОППЕРА
перевод прислал ADAM ("North")
Наиболее важным параметром для чоппера является разнос.
Мы в компании Choppers Unlimited рекомендуем разнос от 2 до 7 дюймов.
Если вы будете соблюдать эти пределы, то у вас есть шанс соорудить
кайфовый, легкоуправляемый чоппер.
Чтобы проверить какой у вас в данный момент разнос,
сделайте следующее.
a) С помощью рулетки или линейки проведите линию через
ось рулевой колонки до земли.
b) После этого, проведите другую линию через центр
передней оси до земли.
Расстояние между этими двумя точками и есть разнос (trail).
Чтобы рассчитать параметры вилки, вам нужно знать
некоторые значения:
LG - полная длинна рулевой колонки.
HH - расстояние от передней оси до земли.
AG - угол наклона вилки.
AS - угол наклона рулевой колонки.
D - расстояние между серединой труб передней вилки и цетром места
крепления вилки к раме.
E - trail, разнос.
HS - расстояние от рулевой колонки до земли.
Trail считается следующим образом:
E(разнос)=HH*tanAS + LG*(cosAG*tanAS - sinAG) - D*(cosAG + sinAG*tanAS)
|
Если вам нужно посчитать максимальную длину вилки, при
которой соблюдаются пределы trail,а (разноса), воспользуйтесь следующей
формулой:
| |
E - HH*tanAS + D*(cosAG + sinAG*tanAS) |
| LG= |
|
| |
cosAG*tanAS - sinAG |
Источник:
|
